

























































































Роботизированный автомобиль на 4WD шасси
- Артикул:02020002
- Доступно:Нет в наличии0
- Страна производства:Китай
Состав набора
4 × Мотор-редуктор
4 × Колесо
4 × Фиксатор для моторов
2 × Основание шасси
1 × L298N драйвер двигателя
1 × Плата UNO R3
1 × Плата расширения для датчиков V4
1 × Беспаечная макетная плата 170 точек
1 × Крепление для ультразвукового датчика
1 × Сервопривод SG90
1 × Ультразвуковой датчик приближения
3 × TCRT5000 ИК светоотражающий фотоэлектрический датчик
1 × ИК приемник
1 × ИК пульт управления (без батареи)
1 × Отсек для батарей 6хАА
1 × Отсек для батарей 2хАА
1 × Провода Dupont 40 пин
1 × Набор крепежа
Способы доставки
![]()
Самовывоз
Вы можете забрать свой заказ самостоятельно в часы работы (Пн - Пт 10.00-18.00) офиса по адресу Староватутинский проезд д.12/3 (м Бабушкинская).
Обязательно ознакомьтесь со схемой прохода/проезда в разделе Контакты.
Внимание! Въезд на территорию на автомобиле не доступен. Машину можно оставить рядом на бесплатной парковке.
Вход на территорию свободный.
Оплата заказа осуществляется наличными. Возможен перевод на банковскую карту.
![]()
Пункты выдачи "СДЭК" в Вашем населённом пункте
Заказ передается в доставку на следующий рабочий день.
Оплата возможна при получении
Cрок доставки зависит от удаленности и рассчитывается автоматически.
После оформления заказа на электронный адрес указанный при оформлении заказа высылается трек-номер для отслеживания
Стоимость доставки рассчитывается автоматически. При заказе от 5000 р – доставка до пункта выдачи бесплатно.
![]()
Курьером "СДЭК" по вашему адресу
Заказ передается в доставку на следующий рабочий день.
Оплата возможна при получении, при этом наложенный платеж взимаемый транспортной компанией указывается при оформлении заказа.
Cрок доставки зависит от удаленности и рассчитывается автоматически.
После оформления заказа на электронный адрес указанный при оформлении высылается трек-номер для отслеживания
Стоимость доставки рассчитывается автоматически
![]()
Почтой России – до почтового отделения в Вашем населённом пункте
Заказ передается на Почту в течении 1-2 рабочих дней после 100% оплаты
Cрок доставки зависит от удаленности и рассчитывается автоматически.
После оформления заказа на электронный адрес указанный при оформлении высылается трек-номер для отслеживания
Стоимость доставки рассчитывается автоматически
Способы оплаты
![]()
Оплата банковской картой
Оплата заказа может быть произведена с использованием банковской карты VISA, Maestro, MasterCard, МИР и другими. Оплата осуществляется прямо на сайте непосредственно после оформления заказа.
Для оплаты (ввода реквизитов Вашей карты) Вы будете перенаправлены на платежный шлюз АО «Тинькофф Банк». Соединение с платежным шлюзом и передача информации осуществляется в защищенном режиме с использованием протокола шифрования SSL. В случае если Ваш банк поддерживает технологию безопасного проведения интернет-платежей Verified By Visa или MasterCard SecureCode для проведения платежа также может потребоваться ввод специального пароля.
Наш сайт поддерживает 256-битное шифрование. Конфиденциальность сообщаемой персональной информации обеспечивается АО «Тинькофф Банк» в соответствии с требованиями Центрального банка. Введенная информация не будет предоставлена третьим лицам за исключением случаев, предусмотренных законодательством РФ.
![]()
Оплата при получении
Заказ можно оплатить наличными, по факту получения товара от Курьера или при получении в пункте выдачи заказов СДЭК.
После оформления заказа наш менеджер при необходимости свяжется с Вами для уточнения деталей.
![]()
Безналичный расчет для юридических лиц
Оформление заказа для юридических лиц возможна при заказе от 5000 рублей.
При оформлении заказа заполните поле Комментарий или вышлите Ваши реквизиты нам на почту [email protected]
Отгрузка товара осуществляется после поступления оплаты
Подробности и основные ответы на вопросы по работе с юридическими лицами в разделе Юридическим лицам
#include <IRremote.h>
/* https://github.com/z3t0/Arduino-IRremote */
#include <Servo.h>
/* Define the pin */
#define Echo A0 //ECHO pin of obstacle avoidance module
#define Trig A1 //Trig pin of obstacle avoidance module
#define ENB 5 //The pin of motor drive
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 10
#define ENA 6
#define RECV_PIN 13 //Infrared receiver pins
#define LineTeacking_Pin_Right 2 //The pins of the trace module
#define LineTeacking_Pin_Middle 1
#define LineTeacking_Pin_Left 4
#define SERVO 12 //Servo motor pins
#define FORWARD 2
#define BACK 8
#define LEFT 4
#define RIGHT 6
#define STOP 5
#define MOVE_MODE 10
#define OBSTACLES_MODE 11
#define LINETRACKING_MODE 12
/* Infrared remote control coding ,Each remote control is different, you need to test the code first */
#define KEY_2 16718055
#define KEY_4 16716015
#define KEY_6 16734885
#define KEY_8 16730805
#define KEY_5 16726215
#define KEY_CH1 16753245
#define KEY_CH2 16736925
#define KEY_CH3 16769565
/* Read the pins of the trace module */
#define LineTeacking_Read_Right digitalRead(LineTeacking_Pin_Right)
#define LineTeacking_Read_Middle digitalRead(LineTeacking_Pin_Middle)
#define LineTeacking_Read_Left digitalRead(LineTeacking_Pin_Left)
int carSpeed = 250;
IRrecv irrecv(RECV_PIN);
decode_results results;
Servo myservo;
int rightDistance = 0, leftDistance = 0, middleDistance = 0;
int Mode = MOVE_MODE;
int Direction = 5;
unsigned long recvTime;
unsigned long lineTime;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
digitalWrite(ENA, HIGH);
digitalWrite(ENB, HIGH);
pinMode(LineTeacking_Pin_Right, INPUT);
pinMode(LineTeacking_Pin_Middle, INPUT);
pinMode(LineTeacking_Pin_Left, INPUT);
myservo.attach(SERVO);
myservo.write(90);
}
void loop() {
recvData();
moveMode();
obstaclesMode();
linetrackingMode();
}
void moveMode() {
if (Mode == MOVE_MODE) {
carSpeed = 250;
switch (Direction) {
case FORWARD: forward(); break;
case BACK: back(); break;
case LEFT: left(); break;
case RIGHT: right(); break;
case STOP: stop(); break;
default: break;
}
if (millis() - recvTime >= 500) {
Direction = STOP;
recvTime = millis();
}
}
}
/* Adjust "carSpeed" if it hits the wall frequently */
void obstaclesMode() {
if (Mode == OBSTACLES_MODE) {
carSpeed = 200;
myservo.write(90);
delay(500);
middleDistance = getDistance();
if (middleDistance <= 40) {
stop();
delay(500);
myservo.write(10);
delay(1000);
rightDistance = getDistance();
delay(500);
myservo.write(90);
delay(1000);
myservo.write(180);
delay(1000);
leftDistance = getDistance();
delay(500);
myservo.write(90);
delay(1000);
if (rightDistance > leftDistance) {
right();
delay(360);
}
else if (rightDistance < leftDistance) {
left();
delay(360);
}
else if ((rightDistance <= 40) || (leftDistance <= 40)) {
back();
delay(180);
}
else {
forward();
}
}
else {
forward();
}
}
}
int getDistance() {
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
return (int)pulseIn(Echo, HIGH) / 58;
}
/*The trace module needs to test whether the low level trigger or the high level trigger.
It can be adjusted according to the actual situation*/
void linetrackingMode() {
if (Mode == LINETRACKING_MODE) {
carSpeed = 150;
if (LineTeacking_Pin_Middle) {
forward();
//Serial.println("forward");
while (LineTeacking_Pin_Middle);
}
if (LineTeacking_Pin_Left) {
right();
while (LineTeacking_Pin_Left);
}
else if (LineTeacking_Pin_Right) {
left();
while (LineTeacking_Pin_Right);
}
else if (LineTeacking_Pin_Left && LineTeacking_Pin_Middle) {
right();
while (LineTeacking_Pin_Left);
}
else if (LineTeacking_Pin_Right && LineTeacking_Pin_Middle) {
left();
while (LineTeacking_Pin_Left);
}
else {
forward();
}
}
}
void recvData() {
if (irrecv.decode(&results)) {
recvTime = millis();
switch (results.value) {
case KEY_2: Direction = FORWARD; break;
case KEY_4: Direction = LEFT; break;
case KEY_6: Direction = RIGHT; break;
case KEY_8: Direction = BACK; break;
case KEY_5: Direction = STOP; break;
case KEY_CH1: Mode = MOVE_MODE; stop(); Serial.println("MOVE_MODE");
delay(1000); break;
case KEY_CH2: Mode = OBSTACLES_MODE; stop(); Serial.println("OBSTACLES_MODE");
delay(1000); break;
case KEY_CH3: Mode = LINETRACKING_MODE; stop(); Serial.println("LINETRACKING_MODE");
delay(1000); break;
default: break;
}
irrecv.resume();
}
}
/* The best thing to do is to input the HIGH and LOW of each pin once,
look at the direction of each wheel of execution, and then define this function */
void forward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
Serial.println("Forward"); //send message to serial monitor
}
void back() {
digitalWrite(IN1, LOW); //set IN1 hight level
digitalWrite(IN2, HIGH); //set IN2 low level
digitalWrite(IN3, HIGH); //set IN3 low level
digitalWrite(IN4, LOW); //set IN4 hight level
Serial.println("Back");
}
void stop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
//Serial.println("stop");
}
void right() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
Serial.println("right");
}
void left() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
Serial.println("left");
}

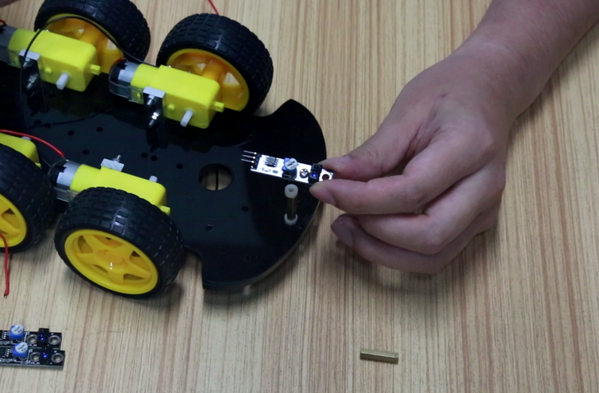
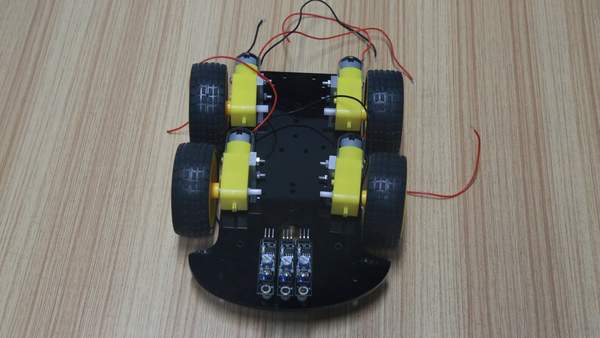
Это должно сократить расстояние между датчиком и поверхностью, полученные данные будут более точными.
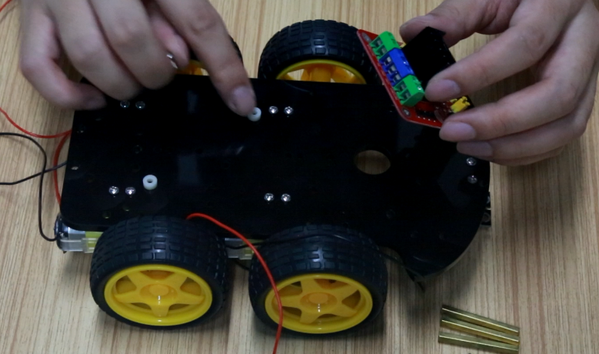
Два конца медной проставки закрепляются винтами.
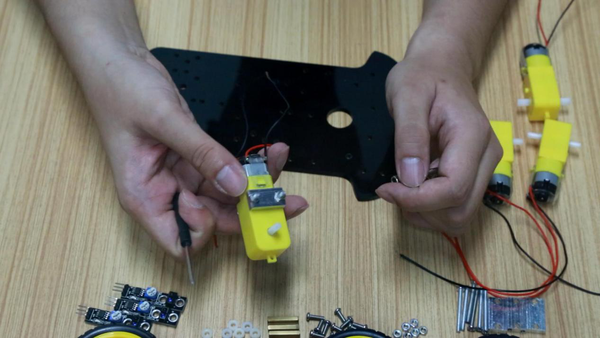
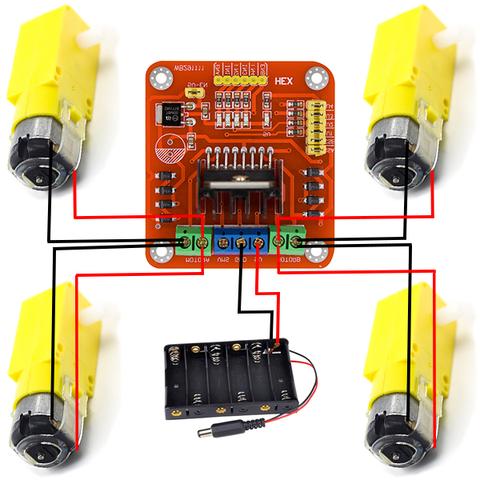
Установка модуля управления моторами

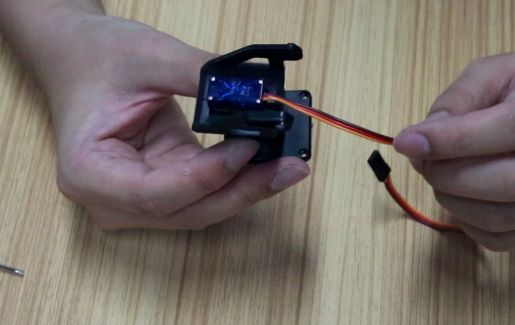
Установите поворотную плату на рулевой механизм, затем закрепите его на черном кронштейне и затяните 5 маленькими винтами.
Поверните рукой качалку сервопривода так, чтобы положение на 90° по отношению к переду автомобиля, затем зафиксируйте.

Прикрепите основание к передней части верхней акриловой платы с помощью тонких длинных винтов и гаек
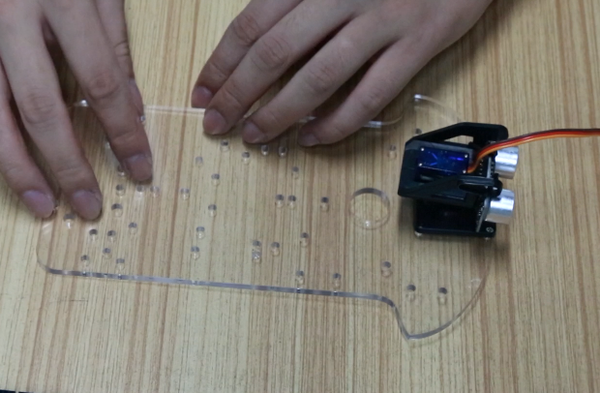
Схема подключения модуля привода моторов и питания
| Ультразвуковой датчик | ECHO | A0 |
| TRIG | A1 | |
| GND | GND | |
| VCC | 5V | |
| Servo | Оранжевый провод | D12 |
| Красный провод | 5V | |
| Коричневый провод | GND | |
| ИК приемник | G | GND |
| R | 5V | |
| Y | D13 | |
| Модуль привода моторов | ENA | D6 |
| IN1 | D7 | |
| IN2 | D8 | |
| IN3 | D9 | |
| IN4 | D10 | |
| ENB | D5 | |
| Датчик линии | G | GND |
| V+ | 5V | |
| S-First | D4 | |
| S-Second | D1 | |
| S-Third | D2 |