






















































































Шаговый двигатель - это бесщеточный двигатель постоянного тока, который преобразует электрические импульсы в механическое движение. Каждый импульс - это поворот Ротора (подвижной части двигателя) на небольшой угол (шаг). Например, если шаговый двигатель имеет 200 шагов на оборот, то после подачи 50 импульсов он сделает четверть оборота. Частота и последовательность влияют на направление вращения и его скорость.
Вступление
Шаговые двигатели часто используются в устройствах, требующих высокой точности. Вы можете найти их в фрезерных станках с ЧПУ, 3D принтерах, роботах на заводах, сканерах или приводах CD/DVD. Шаговики - действительно хорошие и удобные устройства, которые обязательно найдут место во многих ваших проектах.
Что такое шаговый двигатель?
Шаговый двигатель - это бесщеточный двигатель постоянного тока. Как уже упоминалось выше, он приводится в действие электрическими импульсами, которые преобразуются во вращательное движение. Вращение не такое плавное, как у классических двигателей постоянного тока. Полный поворот на 360 градусов состоит из определенного (в зависимости от конструкции) количества шагов. Это позволяет валу вращаться точно без какой-либо обратной связи. Так что специальная плата управления ему не нужна.
В мире хобби наиболее популярны шаговые двигатели с 200 шагами на 360°. Это означает, что вал (ротор) будет поворачиваться на 1,8° каждый раз, когда мы даем импульс (360° / 200 = 1,8°).
Направление вращения и его скорость зависят от последовательности и частоты импульсов.
Как устроен шаговый двигатель?
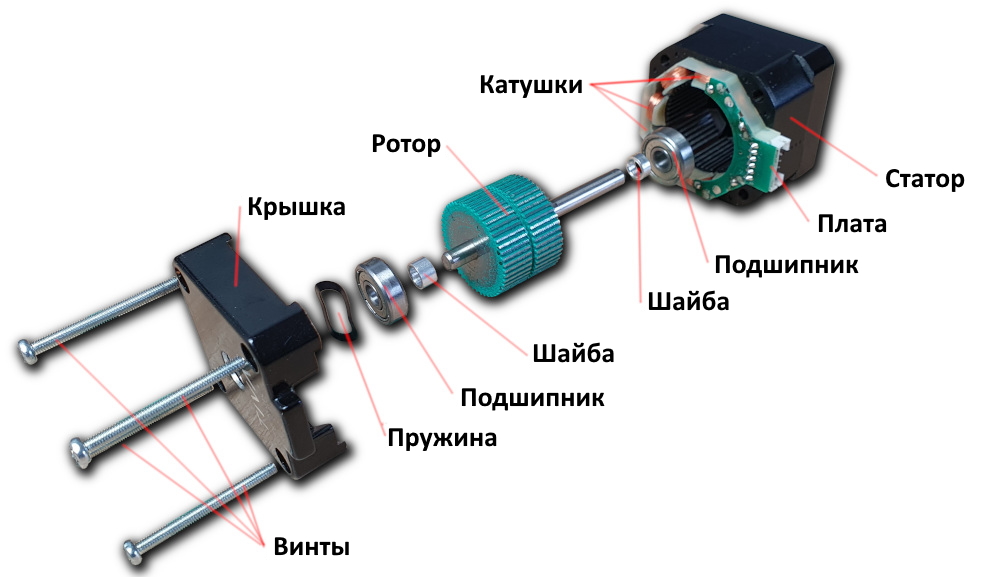
Шаговый двигатель, как классический двигатель постоянного тока, состоит из Ротора и Статора . Статор - неподвижная часть, а ротор, установленный на двух подшипниках, вращается с помощью магнитного поля. Статор - изготовленный из стали или другого металла, выступает в виде рамы для поддержки электромагнитов, которые представляют собой катушки, установленные в определенных местах вокруг ротора. Когда через катушки протекает ток, вокруг них создается магнитное поле. Отдельные магнитные поля имеют направление и интенсивность в зависимости от силы и направления тока, протекающего через данную катушку.
Типы шаговых двигателей
Шаговые двигатели можно разделить по типу конструкции статора и ротора, которая влияет на то, как импульсы преобразуются в движение и по типу способа подключения катушек.
По конструкции:
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель с постоянным магнитом
- Гибридный шаговый двигатель
По способу подключения обмоток:
- Униполярный шаговый
- Биполярный шаговый
Как работает шаговый двигатель?
Каждый тип работает по-своему, поэтому описать работу таких двигателей стоит отдельно.
Шаговый двигатель с регулируемым сопротивлением
Двигатели этого типа не имеют хороших параметров и были вытеснены из промышленности шаговыми двигателями других типов, но опишем его для понимания общего принципа работы.
Полный шаг
Сопротивление в шаговом двигателе понимается как магнитное сопротивление. Если мы поместим проводник в магнитное поле электромагнита, он будет притягиваться. Чем ближе он подойдет, тем меньше будет сопротивление.
На рисунке показан пример шагового двигателя с переменным сопротивлением с четырьмя катушками. Они намотаны попарно и на противоположных сторонах статора. Это дает нам восемь полюсов. Ротор сделан из проводника, а количество выступов (плечей) зависит от количества катушек.
Когда соответствующая пара катушек запитана, самые близкие плечи ротора притягиваются к ним больше всего. Таким образом, будет сделан один шаг. В этом случае расчет угла поворота для одного шага будет следующим:
6 плеч ротора × 4 катушки статора = 24 шага
полный оборот 360° / 24 шага = 15° - за шаг для данного шагового двигателя
Половина шага
Чтобы удвоить количество шагов, мы будем использовать Половину шага вместо Полного шага.
Для этого нужно изменить последовательность включения катушек. В предыдущем случае использовалась только одна пара катушек за раз. На этот раз мы используется две соседние дополнительные пары, чтобы сделать промежуточный шаг. Теперь у нас есть 8 комбинаций (а не 4) катушек с питанием. Это означает, что мы удвоили разрешение до 48 шагов и 7.5° для одного шага.
6 плеч ротора × 8 катушек статора = 48 шагов
полный оборот 360° / 48 шагов = 7.5° - за шаг для данного шагового двигателя
Микро шаг
Возможно еще больше увеличить разрешение. Для этого нам нужно иметь возможность регулировать ток таким образом, чтобы протекающий через катушки был вдвое меньше. Благодаря этому мы удваиваем количество возможных состояний по сравнению с методом Половины шага. Теперь мы имеем 96 шагов и 3,25° на один шаг.
6 плеч ротора × 8 катушки статора × 2 состояния силы тока = 96 шагов
полный оборот 360° / 96 шагов = 3.25° - за шаг для данного шагового двигателя
Таким образом, мы можем все больше и больше увеличивать разрешение. К сожалению, помимо очевидных преимуществ такого метода, у него есть и большие недостатки. Чем больше количество микрошагов, тем чаще переключаются катушки и, следовательно, меньше крутящий момент.
Упомянутые методы управления (Полный, Половина и Микро), применяются для шагового двигателя с переменным сопротивлением. Однако они могут также применяться для любого последующего типа двигателей.
Шаговый двигатель с постоянным магнитом
Шаговый двигатель с постоянным магнитом работает за счет взаимодействия полюсов магнитов. Разные полюса (S - юг - N - север) притягиваются друг к другу, а одинаковые (S - S и N - N) отталкиваются. В результате шаговые двигатели этого типа имеют гораздо больший крутящий момент. В отличие от шагового двигателя с переменным магнитным сопротивлением, двигатель с постоянным магнитом не имеет плеч на роторе. Он построен как бы из нескольких магнитов, попеременно и радиально намагниченных. Разрешение двигателя зависит от количества таких магнитов. Однако чем больше этих магнитов, тем они меньше по размеру и поэтому они меньше взаимодействуют с электромагнитами в статоре. В результате двигатель имеет меньший крутящий момент.
В следующем простом примере показан ротор с шестью магнитными полюсами. С двумя полюсами электромагнитов это дает 12 полных шагов на оборот. Чаще всего встречаются двигатели имеющие 24 или даже 48 шагов.
Гибридный шаговый двигатель
Гибридные шаговые двигатели в настоящее время являются наиболее популярным типом, особенно в промышленности. Они сочетают в себе преимущества двигателей с постоянным магнитом и двигателей с переменным сопротивлением. Благодаря этому у них лучшие параметры, такие как крутящий момент и разрешение. Разрешение типичного гибридного шагового двигателя составляет от 0.9° до 3.6°, что дает от 100 до 400 полных шагов на оборот, а помимо этого к ним также можно применять Микро шаг.
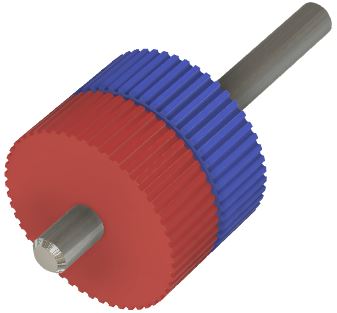
Ротор выполнен из постоянных магнитов, однако, в отличие от двигателя, описанного выше, магниты расположены аксиально, а не радиально. Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них маленькие зубцы. Чем их больше, тем выше разрешение. Зубья на обоих концах (кольцах) ротора смещены на ползуба. У статора тоже есть зубцы, но они на одной прямой. Благодаря этому, когда зубцы одного кольца имеют разные полюса и притягиваются друг к другу, зубцы второго кольца (имеющего тот же полюс, что и катушка) будут точно посередине. Это улучшает характеристики двигателя и увеличивает его крутящий момент.

Ротор шагового двигателя
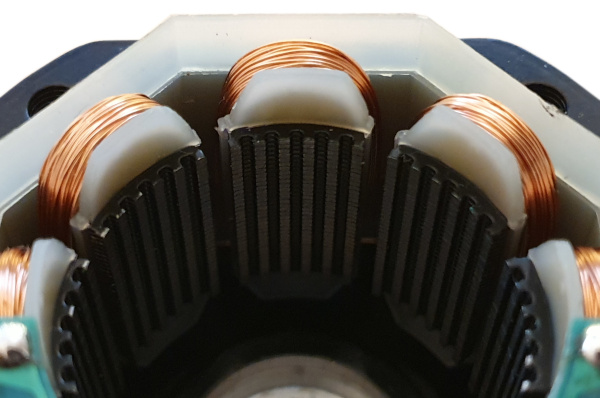
Статор шагового двигателя
Статор такого двигателя обычно имеет две катушки и восемь полюсов. После подачи питания на одну катушку два противоположных полюса будут Северными, а два - Южными . Затем ротор будет вращаться, чтобы выровнять свои намагниченные зубья с полюсами (S и N) статора.
Поскольку ротор имеет два кольца с разными полюсами, на каждом шаге он «удерживается» четырьмя катушками, что увеличивает его крутящий момент.
На этом конкретном шаговом двигателе ротор имеет 50 зубцов, и требуется ровно 4 шага, чтобы повернуть его на одну ступеньку. Таким образом, легко подсчитать, что ротору нужно 200 шагов, чтобы совершить оборот. Что составляет 1,8 ° на полный шаг.
Униполярные и биполярные шаговые двигатели
Термин униполярный или биполярный шаговый двигатель не совсем точен. Это относится не ко всему двигателю, а только к обмотке его катушек. Хотя на практике очень часто можно четко определить, является ли данный шаговый двигатель однополярным или биполярным. Но вы также можете встретить шаговый двигатель, который может быть как «биполярным», так и «униполярным». Поэтому далее предположим, что речь идет о методе шагового управления, а не о его типе.
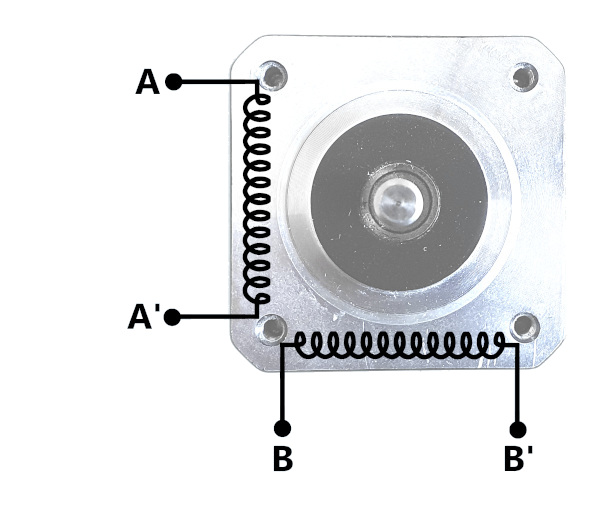
Биполярный шаговый двигатель
Биполярные шаговые двигатели имеют четыре провода. Они работают с двумя полностью изолированными друг от друга обмотками.
Эти шаговые двигатели довольно сложно контролировать, поскольку, чтобы перевернуть магнитный полюс, нужно изменить направление тока в обмотке. И это делается с помощью двух H-мостов (восемь транзисторов).
Мы можем использовать всю длину катушки в каждой фазе, что приводит к высокому крутящему моменту.
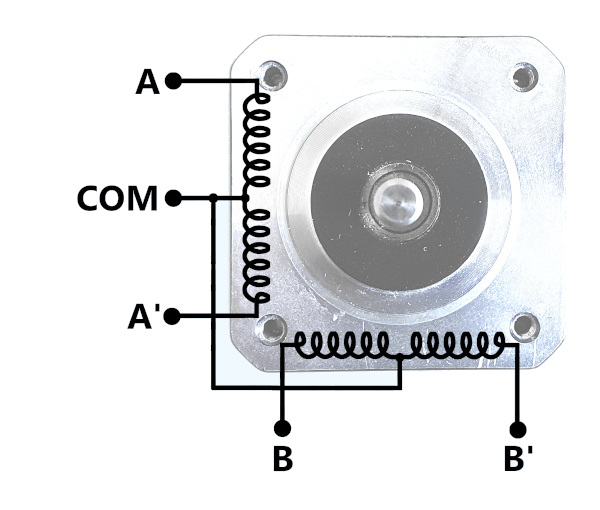
Униполярный шаговый двигатель
У униполярных шаговых двигателей пять проводов. Они работают с одной обмоткой с центральным отводом на фазу. Общий провод (COM) постоянно заземлен (чаще всего). Мы можем перевернуть магнитное поле, подключив разъемы A или A' (B или B').
Благодаря такой конструкции для управления этим двигателем достаточно четырех транзисторов (а не восьми, как в биполярных шаговых двигателях).
Но поскольку мы можем использовать только половину катушки в каждой фазе, эти шаговые двигатели имеют относительно низкий крутящий момент.
Биполярный или униполярный шаговый двигатель
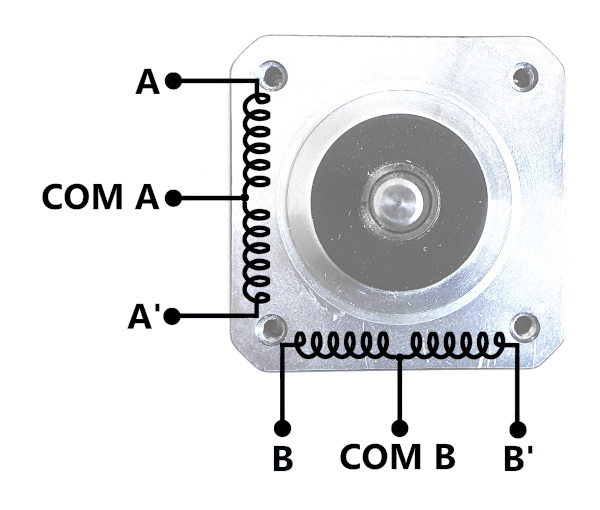
Этот тип шаговых двигателей имеет шесть проводов. Как вы можете видеть на картинке, это комбинация униполярных и биполярных двигателей. Он имеет две обмотки, отделенные друг от друга, но они разделены пополам и выведены в виде двух дополнительных проводов. Это решение позволяет управлять обоими способами. В этом случае вы определяете больший крутящий момент или более простое управление.
Что нужно учитывать при выборе шагового двигателя?
Недостатки
- скорость шаговых двигателей не очень высокая от единиц до десятка оборотов в секунду
- по мере увеличения скорости его удерживающий момент (Нм) уменьшается
- относительно высокое энергопотребление
- высокая теплоотдача
- если нагрузка слишком высока, могут произойти пропуски шагов
Преимущества
- высокая точность позиционирования, но без обратной связи
- простота управления - количество импульсов определяет положение вала, а частота определяет скорость
- возможность работы на малых оборотах (без использования редукторов)
- срок службы шаговых двигателей довольно большой, благодаря отсутствию фрикционных элементов





")
")
")
")









